
- 光学関連
次世代の車載センサー「LiDAR」の基礎知識
目次
次世代の車載センサー「LiDAR」とは?
近年、自動車の自動運転を実現する重要技術の一つとして、「LiDAR(ライダー)」と呼ばれるセンサーの研究開発が世界的に進んでいます。LiDARという名称は、「光による対象物の検出と距離の測定」を意味する英語「Light Detection And Ranging」の頭文字から名付けられました。
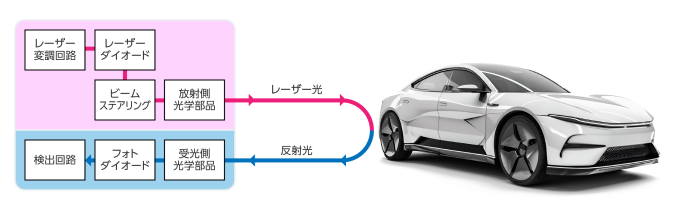
LiDARは近赤外線などの光を対象物に走査しながら照射し、その散乱や反射光を受光部でキャッチすることで、対象物までの距離や速度を計測したり、対象物の形状を特定することを可能にするセンサーです。
原理としては、レーダーが電波を対象物に照射して、その反射を捉えることで距離を測るのと同じですが、 電波よりもはるかに波長の短い光を利用することにより、レーダーでは補足できない小さな物体を、その形状まで特定できる高い測距性能をもっているのが特徴となっています。
LiDARは1960年代に開発され、その後、航空宇宙分野で地形図の作成などに使われてきました。また雲やエアロゾルなどの小さな粒子も捉えることが可能なことから、気象学でも活用されています。近年になってLiDARが大きな注目を集めるようになったのは、自動運転技術の急速な進歩にともない、障害物や他の車、人などを離れた場所から検知するセンサーとして活用されるようになったことが理由です。
レベル3以上の自動運転車の普及はこれから
自動車の自動運転システムには、1〜5までのレベルがあり、LiDARはレベル3以上の自動運転を実現するのに役立つことが期待されています。レベル1と2は運転の主体が人で、システムが人の運転のサポートを行います。レベル1、2の自動運転では、障害物と衝突しそうになったときに自動的にブレーキをかける、高速道路などの一定条件下でハンドルから手を離した状態(ハンズオフ)で車線を維持しながら走行する、前方の車と速度を合わせて追走する、遅い車を安全に追い越す、などの運転行動をシステムがサポートします。このレベル1、2の自動運転を可能にするシステムは、「ADAS(Advanced Driver-Assistance Systems,先進運転支援システム)」と呼ばれています。
それに対して自動運転レベル3から5では、運転の主体が人ではなく、システムになります。ドライバーは車の運転をシステムに委ねることで、道路状況を常に注視する必要がなくなり(アイズオフ)、走行中に運転以外のことができるようになります。
2024年現在、ハンズオフ機能を搭載したレベル2の自動運転システムを搭載した自動車が、世界の主要メーカーから続々と発売されるようになりました。しかし,レベル3以上の自動運転に対応した市販車は世界でもほとんど発売されておらず、日本においても2021年に国内メーカーから1車種がリース専用車両として100台のみ限定発売されて以降(2023年に生産中止)、どのメーカーからも発売されていません。現在、レベル3以上の自動運転システムの実現を目指して、世界の自動車メーカーが技術開発にしのぎを削っており、各国も将来に備えて道路交通法の改訂作業などを進めています。
他のセンサーにはないLiDARの優れたメリット
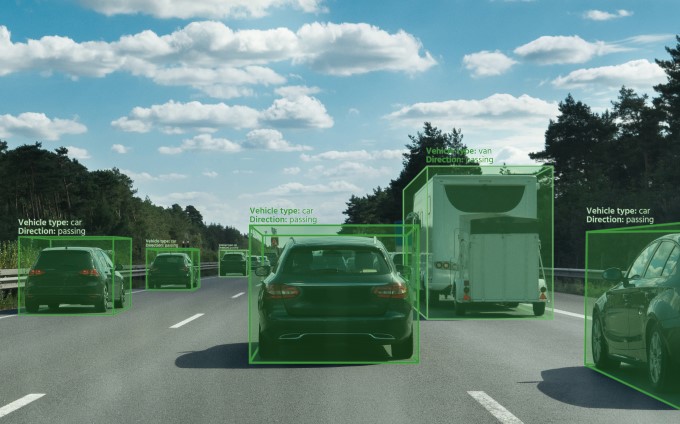
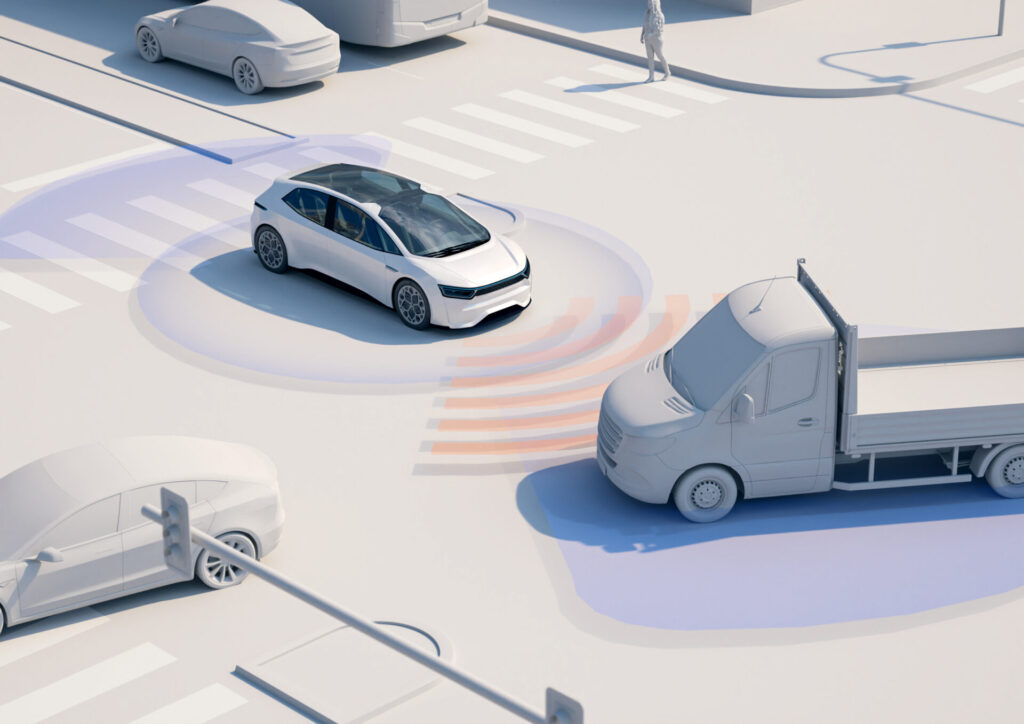
ここからは、LiDARについての基礎知識について解説します。自動運転を実現するには、道路を走行する他の車や、歩行者、交通標識、道路のレーン、障害物などの情報をリアルタイムで検知する必要があります。その外界の情報を検知するために、自動運転車にはカメラ、ミリ波レーダー、超音波センサー、LiDARなどの各種センサーが搭載されます。複数のセンサーを搭載するのは、それぞれに得意・不得意があるからです。カメラはAIと組み合わせることで画像認識の性能が大きく向上しましたが、夜間や悪天候時に性能が落ちることと、対象物の距離を正確に把握するのが難しいという欠点があります。ミリ波レーダーは悪天候時でも対象物との距離を測れますが、正確な形状は認識できず、また電波の反射率が低い物体、近距離の物体の検知が困難という特徴を持っています。その逆に超音波センサーは10メートル程度の近くにある物体しか検知できないため、主に車の駐車時のバック・前進時のソナーとして使われています。
それに対してLiDARは、他の車や障害物、歩行者などの対象物と自車の間の距離を、200~300メートルも離れた場所から正確に検知することができ、対象物の形も三次元で正確に把握することができます。カメラとは違い暗い夜間でも対象物を捕捉でき、高精細マップとLiDARを組み合わせることで、自車の位置を常に正確に把握することができるようになることから、レベル3以上の自動運転の実現には必須となると考えられています。
新しい測距技術「FMCW方式」の利点
現行のLiDARセンサーの測距方式として採用されているのが、ToF(Time of Flight)と呼ばれる方式です。ToFは、LiDARセンサーが発したパルス光が、対象物から反射して受光部に戻って来るまでの遅延時間から距離を計測します。しかしこの方式は、他の光の影響を受けやすく、雨天や霧などの悪天候時に性能が低下することが欠点となっています。
その課題を解決する測距方式として期待されているのが、FMCW(Frequency Modulated Continuous Wave:周波数変調連続波)と呼ばれる方式です。FMCWではLiDARセンサーから、周波数変調した光を放射します。その光は対象に当たって反射し、LiDARセンサーの受光部に戻りますが、そのときにLiDARから発した光とは違う周波数になっているため、その2つの周波数変調の差分から対象物との距離と速度を演算します。
FMCWはToFに比べて、弱い光でも検知が可能で、他の光や雨、霧などから受ける影響も少なく、またより遠い距離の対象物を計測することができます。また対象物(他の自動車など)が自車に向かって進んでいたり、逆方向に走っていたりする場合、ドップラー効果によって周波数が変化することから、対象物の速度を計算できることも大きな利点です。そのようなメリットからFMCW方式は「次世代のLiDAR」として世界各国で研究開発が進んでいます。
このように次世代の自動運転車に搭載されるセンサーの「本命」と見なされているLiDARですが、現時点では一部の高級車のみに採用が限定されています。その理由は大きく2つ、高性能のLiDARの価格が数十万円以上と非常に高価なことと、装置が大きく設置スペースが限られるため、外観デザイン上の制約が生じることです。
LiDARのコスト削減と小型化を可能にするフラッシュ方式
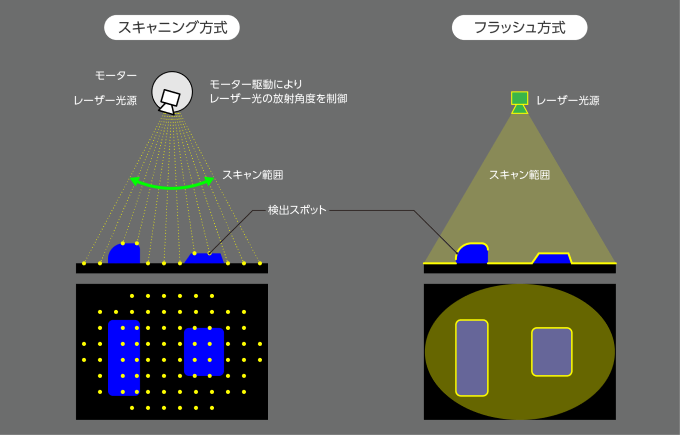
LiDARには測距方式以外にも、レーザー光の違いや、光の走査方式の違いなど、さまざまなタイプがあります。走査方式で現在開発が進んでいるのが、「フラッシュ」と呼ばれる方式です。従来のメカニカル型と呼ばれる方式のLiDARは、広い範囲の対象物を捉えるために、投射光をモーターで回転するミラーを用いて走査する必要がありました。それに対してフラッシュ方式のLiDARは、レーザー光を拡散させて照射することで物体の検知を行います。メカニカル方式に比べてモーターなどの可動部品が必要ないため、フラッシュ方式はLiDARの製造コストの削減と小型化につながることが期待されています。
光を自在に操る技術で自動運転に貢献
長年にわたって光を自在に操る技術を磨いてきた私たちデクセリアルズは、次世代の自動運転車を支えるLiDARの技術開発に貢献できるさまざまな製品群と知識を保有しています。
ディスプレイやスマートフォンに幅広く採用されている当社の反射防止フィルムは、LiDARに応用することでフレアなどの光のノイズの発生を抑制するとともに、受光したい周波数の光の透過率を高めることを可能とします。フラッシュ方式のLiDARは、光の拡散を正確にコントロールする必要がありますが、当社がプロジェクター用に開発してきた拡散板の技術を応用することができます。さらに当社がスマートフォンのカメラ部品、デジタルカメラのレンズ固定のために磨き上げた特殊な接着剤、精密接合用樹脂を用いての「高精度固定技術」は、LiDARや車載カメラなどのセンサー類を正確に固定し、安定した検知を行うことを可能とします。
人々が、安全で便利に、自由に移動できる未来を目指して、私たちデクセリアルズも自動運転技術の発展に貢献してまいります。
関連記事

私たちデクセリアルズはデバイスの進化に欠かせない材料や次世代のソリューションを生み出す、マテリアルメーカーです。
電子部品、接合材料、光学材料をはじめと世界中のパートナーと新しい価値を生み出していきます。
- SHARE
当社の製品や製造技術に関する資料をご用意しています。
無料でお気軽にダウンロードいただけます。
お役立ち資料のダウンロードはこちら関連製品

関連記事
光学関連の人気記事









当社の製品や製造技術に関する資料をご用意しています。
無料でお気軽にダウンロードいただけます。
お役立ち資料のダウンロードはこちら